

Roboter-Kalibrierung einfach und verlässlich:
Das TCP-Kalibriergerät für Roboter
Sie haben Fragen? Wir helfen Ihnen gern!
Das TCP-Kalibriergerät ist einfach und flexibel einsetzbar
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Viele Anwendungsmöglichkeiten mit einem Gerät
Preiswerte Lösung für einfache und genaue TCP (tool center point)-Kalibrierung von Robotern und Fasenaggregaten.
Sehr hohe Kalibriergenauigkeit (<0,1mm).
LED-Anzeige zur Visualisierung der TCP-Position.
Schnelle und unkomplizierte Installation an der Maschine.
Batteriebetrieben und damit kabellos.
Bei Kenntnis der Mehrpunkt-Vermessung keine Schulung notwendig.
Aufzeichnung der Meßwerte über WLAN-Anbindung auf NC-Steuerung, PC oder Smart Device möglich.

Roboter-Kalibriereinheit
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
- Preiswerte Lösung für einfache und genaue TCP (tool center point)-Kalibrierung von Robotern und Fasenaggregaten
- Sehr hohe Kalibriergenauigkeit (<0,1mm)
- LED-Anzeige zur Visualisierung der TCP-Position
- Schnelle und unkomplizierte Installation an der Maschine
- Batteriebetrieben und damit kabellos
- Bei Kenntnis der Mehrpunkt-Vermessung keine Schulung notwendig
- Aufzeichnung der Meßwerte über WLAN-Anbindung auf NC-Steuerung, PC oder Smart Device möglich
Für viele Roboteranwendungen
Kundenstimmen

Die Frasohn Elektronische Gerätebau – GmbH ist Hersteller von Hochspannungsgeräten für elektrostatische Filteranlagen. Diese Geräte verfügen über einen Kessel aus Stahl, in dem sich unter anderem der Hochspannungstransformator befindet, der mit Isolationsöl gefüllt wird. Den Kessel schweißen wir selbst mit einem Schweißroboter und er muss zu 100 % dicht sein. Das kann man nur mit einer perfekten Schweißnaht erreichen.
Wir verwenden die ZIS-Kalibrierungseinheit für die Vermessung des ToolCenterPoints (TCP) bei unserm Schweißroboter. Durch diese exakte Bestimmung konnten wir die Qualität der Schweißnähte deutlich verbessern.
Die ZIS-Kalibriereinheit zeichnet sich durch ihre Bedienerfreundlichkeit aus. Mit ihr den TCP zu vermessen ist sehr einfach und stellt eine große Arbeitserleichterung dar.
Für uns ist die ZIS-Kalibriereinheit eine Investition, die sich gelohnt hat. Die Firma ZIS Indurstrietechnik GmbH ist ein verlässlicher Partner bei der Auftragsabwicklung und beim technischen Support und wir können sie und ihre Produkte nur weiterempfehlen!
Thomas Teichmeister
Geschäftsführer und technischer Leiter, Frasohn Elektronische Gerätebau – GmbH

Wir verwenden die ZIS TCP-Kalibriereinheit zum Teachen, Verfolgen und Benchmarken unserer Fanuc LR Mate-Roboter. Wir sind ein kleiner Hersteller von medizinischen und orthopädischen Modellen und verwenden die Roboter, um Präzisionsschnitte und Löcher in medizinische Modelle zu bearbeiten. Dies erfordert eine höchstmögliche Genauigkeit bei der Einstellung des TCP.
Die ZIS-Kalibriereinheit ist ein sehr einfach zu erlernendes und zu verwendendes Werkzeug. Es verfügt über visuelle "X", "Y" "Z" LED-Positionsanzeigen. Die gemessenen Werte können über die WiFi-Schnittstelle an die mitgelieferte Software „RobCal“ übertragen und dort analysiert und protokolliert werden. Es hat auch ein .DXF-Diagramm jeder der Achsenbewegungen, das äußerst nützlich ist, um die Bewegung für zukünftige Referenzen zu vergleichen.
Das ZIS-Gerät wird in einem sehr schön gepolsterten Holzkoffer geliefert, in dem das Gerät und das gesamte Zubehör sicher untergebracht sind.
Ich denke, dass die ZIS-Kalibrierungseinheit definitiv die Investition wert ist, die wir getätigt haben. Das Gerät erlaubt uns eine präzise kontrollierbare Kalibrierung des TCP und ermöglicht uns damit eine höhere Genauigkeit unserer Roboter.
Jay Deibell
Electrical Controls Engineer, Pacific Research Laboratories, Inc.
RobCal-Software
- Aufzeichnung, Visualisierung, Protokollierung und Analyse der Messdaten der Kalibriervorrichtung
- Ausgabe des Messprotokolls in PDF-Format
- Export der Messdaten in DXF-Format
- Einfache schrittweise Benutzerführung
Senden Sie uns eine Kontaktanfrage, wenn Sie mehr Informationen benötigen. Gern präsentieren wir Ihnen die Funktionalität über eine Internet-Videokonferenz.

FAQ zur Roboter Kalibriereinheit
Warum ist eine Roboterkalibrierung nötig?
Roboter sind sequentielle kinematische Strukturen mit 6 hintereinander angeordneten Antrieben. Auf Grund dieser kinematischen Struktur muss ein Roboter alle 6 Antriebe bewegen, um eine einfache lineare Bewegung zu realisieren.
Geliefert wird von dem Hersteller nur der Roboter an sich, Werkzeuge bzw. Spanner werden danach durch Systemhäuser bzw. Anwender angebaut. Damit ein Roboter die notwendige Geometrie dieser Werkzeuge kennenlernt, muss der TCP vermessen und die Nullstellung der Achsen gesetzt werden. Dies nennt man den Roboter kalibrieren.
Was ist ein TCP (Tool Center Point)?
Unter dem TCP oder Tool Center Point versteht man das Tool- oder Werkzeugkoordinatensystem des Roboters. Bei einem MAG-Brenner liegt der Tool Center Point z.B. in der Drahtspitze.
Geometrisch repräsentiert der TCP oder Tool Center Point den Versatzvektor von dem Flanschkoordinatensystem des Roboters zu dem Tool- oder Werkzeugkoordinatensystem.
Neben der Achskalibrierung (Einstellen der Nulllage der 6 Antriebsachsen des Roboters) ist die Vermessung des TCP Voraussetzung für eine exakte Roboter Kalibrierung.
Wie erfolgt eine TCP (Tool Center Point)-Kalibrierung?
Die Vermessung des TCP (Tool Center Points) kann über verschiedene Varianten erfolgen:
- Mehrpunktkalibrierung
Der Roboter fährt mit dem TCP in verschiedenen Stellungen ein und denselben Raumpunkt an. Die Anzahl der notwendigen Stellungen ist abhängig von dem verwendeten Robotertyp (KUKA- 4 Stellungen, FANUC – 3 oder 6 Stellungen). Der Roboter berechnet auf Basis dieser Stellungen automatisch den TCP. - Vermessenes Werkzeug
Das Werkzeug wird auf einer externen Vorrichtung absolut vermessen und die TCP-Werte werden manuell in den Roboter als Koordinaten übertragen.
Kann ich für meinen Roboter verschiedenen TCP nutzen?
Um verschiedene Werkzeuge abzubilden erlauben die Robotersteuerungen die Speicherung verschiedener TCP-Werte. Durch die Anwahl eines Werkzeuges wird auch der zugehörige TCP-Vektor aktiviert.
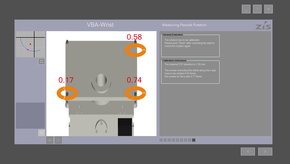
Wie hilft eine ZIS Roboter-Kalibriereinheit bei der Vermessung des TCP?
Die Roboter Vermessung ist in der Praxis für die Anwender mit vielen Schwierigkeiten verbunden. Die ZIS Roboter-Kalibriereinheit vereinfacht die Vermessung des Roboters und erlaubt eine anwenderunabhängige Wiederholgenauigkeit. Für die Industrieroboter Kalibrierung werden folgende Funktionen unterstützt:
- Für die Mehrpunktkalibrierung arbeitet die Kalibriereinheit wie eine elektronische Spitze. Die LED-Anzeigen an der Oberseite zeigen dem Anwender exakt an, wie er den Roboter zu verfahren hat, um die anzufahrende Position zu erreichen.
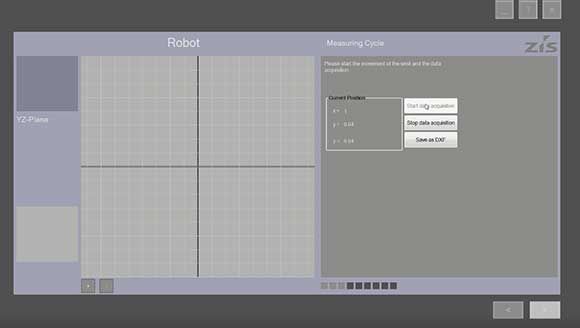
- Mit Hilfe der Software „RobCal“ kann das Gerät mit einem Laptop über WiFi verbunden werden. Mit Hilfe einer Schwenkung um den TCP kann die Genauigkeit der Kalibrierung überprüft und aufgezeichnet werden.
Wie kann ich die Daten von „RobCal“ weiter verwenden?
Die von „RobCal“ aufgezeichneten Daten können in folgender Form weiterverwendet werden:
- Grundlage für die Berechnung der Genauigkeit des Roboters innerhalb der „RobCal“-Software durch Berechnung der TCP-Abweichung in den 3 Hauptebenen
- Speicherung als dxf-Format zur Weiterverwendung/Auswertung in einem CAD-System
- Ausdruck der TCP-Genauigkeit in einem pdf-Protokoll zur Dokumentation gegenüber Kunden oder für die Archivierung.
Sie haben Fragen oder interessieren sich für ein Angebot?
Oder nutzen Sie unseren Updateservice!
So erhalten Sie immer wenn es Updates, Angebote oder Neuigkeiten zu unserer Roboter Kalibriereinheit gibt, eine kurze Info von uns.